Premessa:
Installare Occidentalist distro Vedere Lezione Come installare occidentalist
Con questa guida sarete in grado di pilotare un servo motore con la Raspberry Pi. Il nostro intento sarà quello di fare un piccolo esempio di programmazione python che ci permetterà di comunicare con il servo. inseriremo un dato valore che ci consentirà tramite una specifica libreria di pilotare la gradazione da noi scelta ed effettuare i primi movimenti.
LISTA DEI MATERIALI:
Software e Hardware
# Servo Control
import time
def set(property, value):
try:
f = open("/sys/class/rpi-pwm/pwm0/" + property, 'w')
f.write(value)
f.close()
except:
print("Error writing to: " + property + " value: " + value)
def setServo(angle):
set("servo", str(angle))
set("delayed", "0")
set("mode", "servo")
set("servo_max", "180")
set("active", "1")
delay_period = 0.001
angle=40
while True:
setServo(angle)
time.sleep(delay_period)
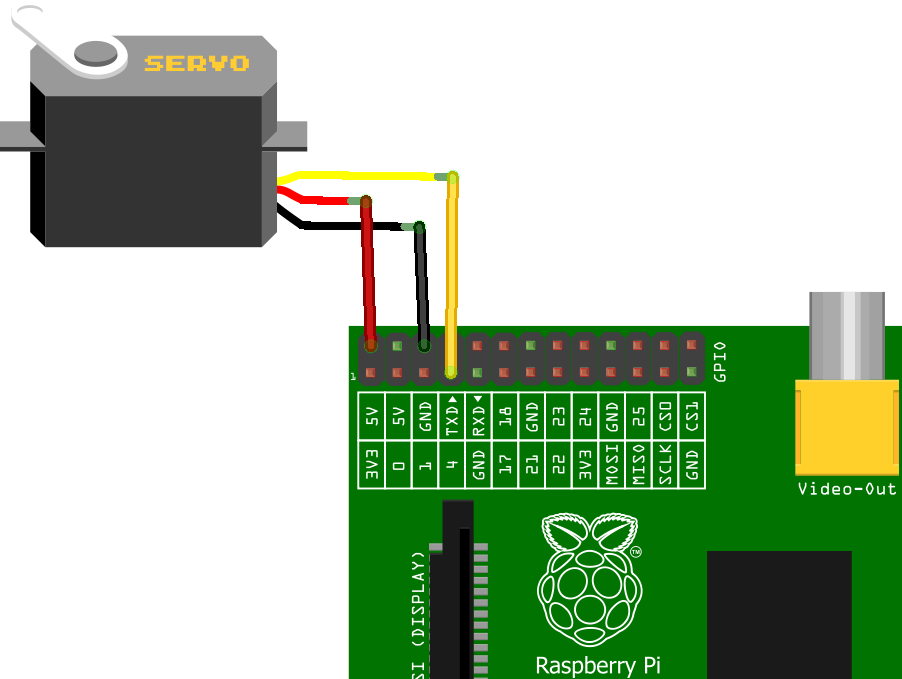
Connessione Servo: NOTA BENE
Collegare il filo rosso del servo ai 5 volt il nero alla GND (massa) e il terzo filo solitamente giallo al GPIO 18 che è l unico pin che supporta il controlo PWM del servo Sulla Raspberry Pi quindi collegare esclusivamente pin IN al GPIO 18.
Buon Progetto
